导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1579 播放
收藏
片段保存及分享
播放有问题?
请戳这里
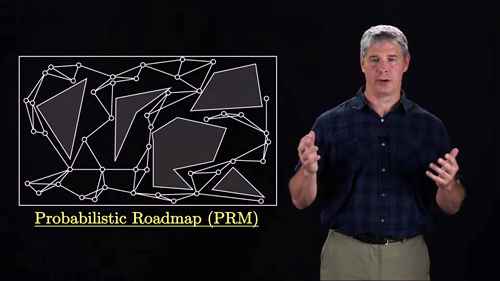
机器人路径规划7
时长:3 分钟
类别:智能机器人技术
简介:PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
标签:
教学
智能机器人技术
路径规划技术
相关视频:
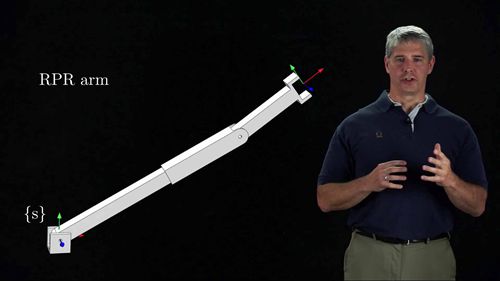
正向运动学1
我将在视频中介绍开链机器人正运动学中,在空间坐标系中表示的指数积公式。
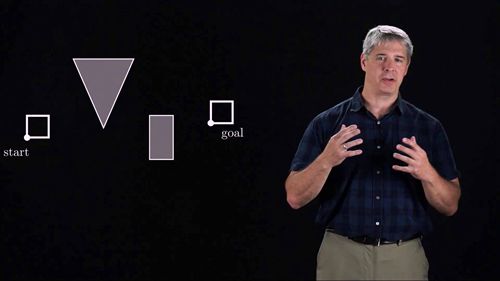
机器人路径规划5
本视频介绍了路径规划的路线图算法:如果存在一条路径,那么采用这种算法就能保证会找到这条路径。然而,该算法往往只适用于简单的、低维的问题。在视频中给出的一个例子是平面多边形在多边形障碍间转换的路径规划。
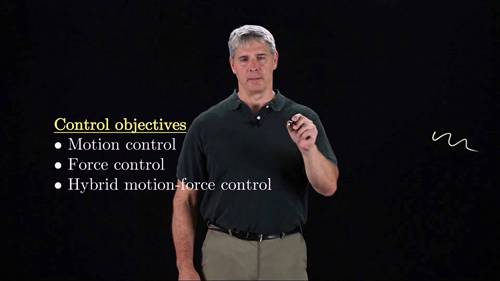
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
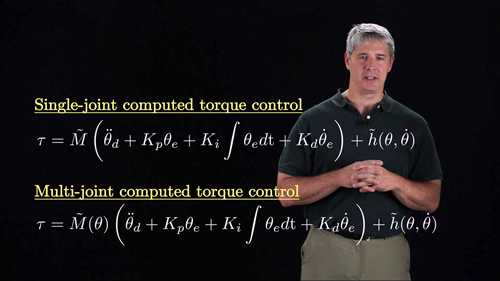
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
未来的智能机器人
机器人的发展史犹如人类的文明和进化史在不断地向着更高级发展。目前为止,智能机器人技术取得了哪些发展?是否真的马上就会像科幻片中的那样取代人类了呢?
脑机接口能改变人类未来吗
想象一下,你可以用意念控制你的智能手机、电脑,用思维来打字。特斯拉首席执行官埃隆·马斯克表示,这些很快就会成为现实,让我们去看看Neuralink公司最新的研究进展吧。
机器人路径规划7
PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
观看记录: