导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1513 播放
收藏
片段保存及分享
播放有问题?
请戳这里
利用深度强化学习规划四足步态
时长:9 分钟
类别:智能机器人技术
简介:ETH的Anymal研究团队为感知地形运动制订了特定的神经网络策略,在模拟三维环境中,分别使用“本体感受”和“外在感受”来执行“落脚点与肢体联动规划”。
标签:
教学
智能机器人技术
多足机器人
相关视频:
机器人是如何制造的
机器人已经广泛应用到了制造业当中。但现在,它们正在走进我们的日常生活。了解目前的技术是如何实现让机器人在生活的方方面面协助人类的吧,顺便看看机器人是如何制造出来的!
多足机器人马克思
由CSIRO公司开发的多足机器人马克思是一个超轻的六足机器人,它可在具有挑战性的室内和室外环境中进行探索工作。
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
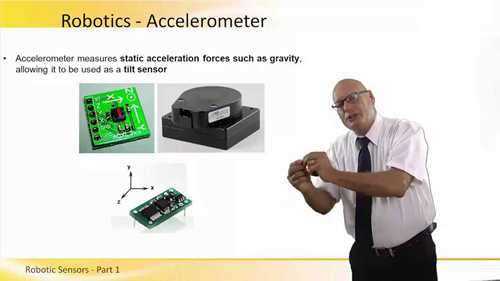
机器人用传感器1
机器人变得越来越智能,这与它们分析传感器状态的能力提升有关,本视频将回顾机器人会使用的不同类型传感器,包括触觉、声音、光、超声波、速度、振动传感器等。
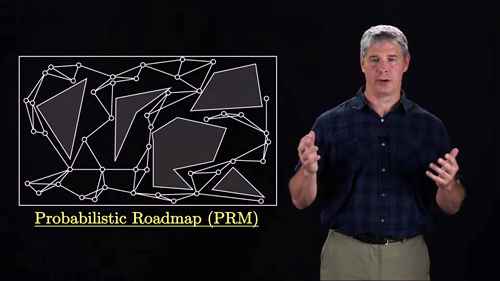
机器人路径规划7
PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
自动送货机器人
打开手机,点了一个外卖,过了一会儿,你收到提示说你的外卖已送达。打开门,一个造型可爱的机器人在你的门外。你取走外卖,机器人和你再见。这已经成为了现实。6个自动送货机器人分别名为Starship、Kiwi、Robomart、TeleRetailRobot、AmazonScout、FedExSameDayBot已经开始被使用,它们可能成为未来餐饮外卖的主流。
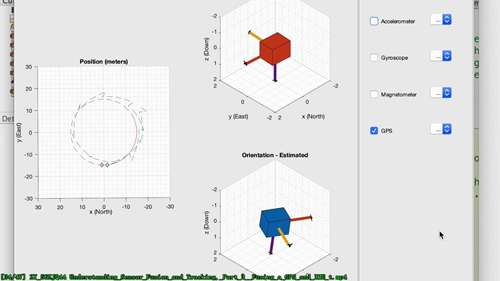
传感器融合与跟踪3
我将继续接着上一集的内容讨论使用传感器融合来定位的方法。
观看记录: