导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1645 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪5
时长:16 分钟
类别:智能机器人技术
简介:目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
标签:
教学
智能机器人技术
传感器融合
相关视频:
多足机器人步态规划
在本视频中,我们提出了一种混合整数双层规划的凸组合算法,以一种高效的计算方式同时规划接触位置、步态过渡。
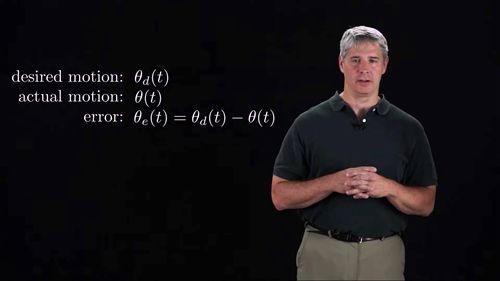
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
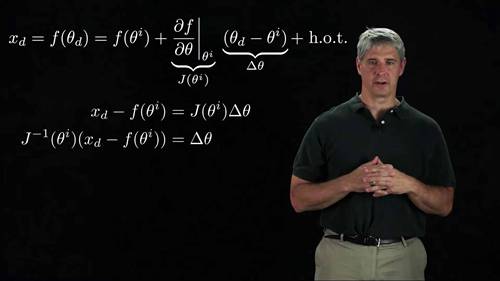
逆向运动学2
这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
神经接口简述
神经接口、脑机接口等技术具有非凡的潜力。这些技术可以改变医学,从根本上改变我们与技术之间的互动方式。
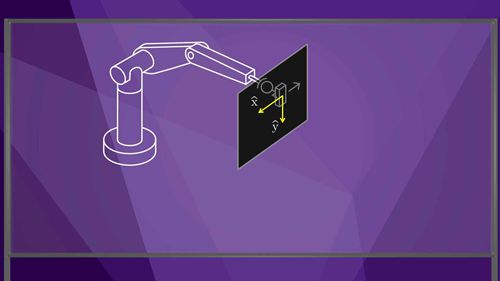
混合运动力控制
本视频介绍了混合运动力控制:控制机器人在无约束方向上产生期望的运动和在约束方向上产生期望的力。
机器人是如何制造的
机器人已经广泛应用到了制造业当中。但现在,它们正在走进我们的日常生活。了解目前的技术是如何实现让机器人在生活的方方面面协助人类的吧,顺便看看机器人是如何制造出来的!
线性误差动力学
本视频介绍了线性误差响应,误差动力学由线性常微分方程来描述,也可以表示为一阶耦合微分方程,xdot = Ax。
观看记录: