导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1703 播放
收藏
片段保存及分享
播放有问题?
请戳这里
扭矩或力输入的运动控制1
时长:4 分钟
类别:智能机器人技术
简介:本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
标签:
教学
智能机器人技术
控制系统
相关视频:
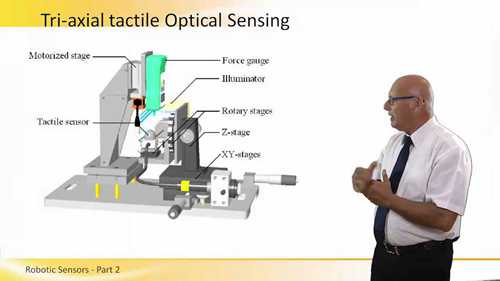
机器人用传感器2
在该教程的第一部分中,我们学习了常用的机器人传感器,那么在这一集里我们将学习一些较特殊的传感器,如,扫描传感器,旋转传感器,障碍物探测器,红外温度传感器,极化传感器等。
未来的创新型机器人
今天的节目中,我们来到了卡耐基梅隆大学,在那里我们将欣赏他们研制出的一系列最新奇的机器人,看看它们将如何帮助人类改善生活。
通过脑机接口技术获得触觉
美国国防部高级研究计划局首次在人体上演示了一项前沿技术,即将机械臂与神经系统相连接,让个体从大脑中感知触觉。
脑机接合
埃隆·马斯克开创的Neuralink公司正在开辟一条通往人类数字化的道路,研究对象为“脑机接口”技术,利用电流让电脑和脑细胞“互动”。
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
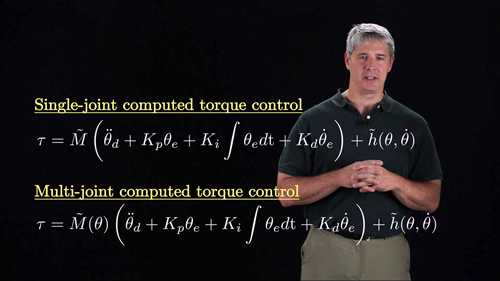
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
机器人起源
智能型机器人是人类最渴望能够早日制造出来的机器朋友。然而要制造出一台智能机器人并不容易,仅仅是让机器模拟人类的行走动作,科学家们就要付出了数十甚至上百年的努力。机器人到底是如何发明出来的呢?收看视频吧。
多足机器人步态规划
在本视频中,我们提出了一种混合整数双层规划的凸组合算法,以一种高效的计算方式同时规划接触位置、步态过渡。
观看记录: