导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1524 播放
收藏
片段保存及分享
播放有问题?
请戳这里
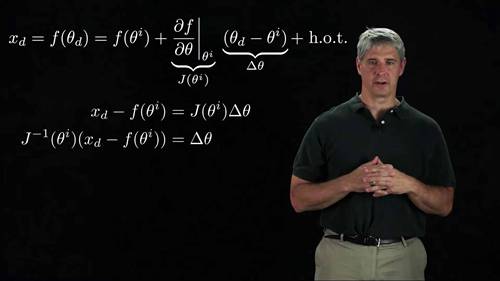
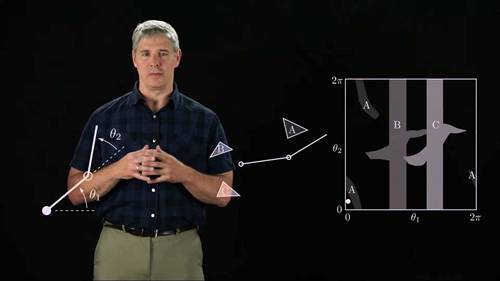
逆向运动学3
时长:5 分钟
类别:智能机器人技术
简介:这一集将延续上一集的内容,介绍数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由变换矩阵表示。
标签:
教学
智能机器人技术
逆向运动学
相关视频:
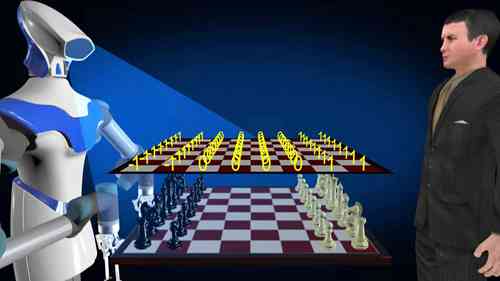
Atlas和Handle机器人
波士顿动力公司的机器人Atlas和Handle是世界上最具活力的类人机器人,Atlas已经掌握了倒立、360度翻转、旋转等多项技能,Handle机器人能够载重、下蹲和跨越障碍物,再次让我们大开眼界。让我们一起去看看这两款机器人到底有多先进吧。
逆向运动学2
这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
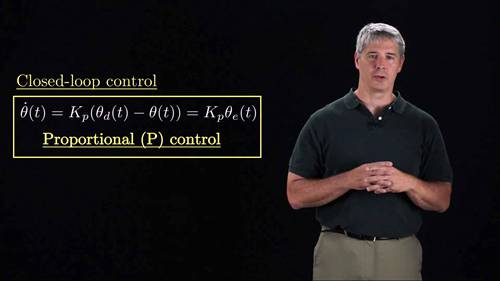
带速度输入的运动控制1
这个视频介绍了单自由度系统位置的比例(P)控制,其中控制输入是速度。
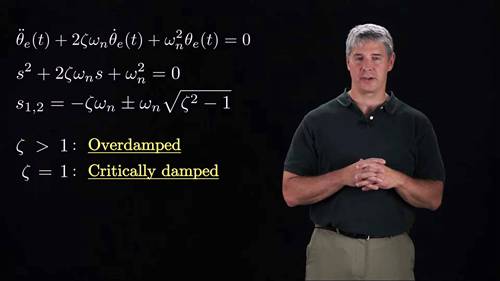
二阶误差动力学
本视频研究的是以二阶线性常微分方程来描述的误差动力学模型。
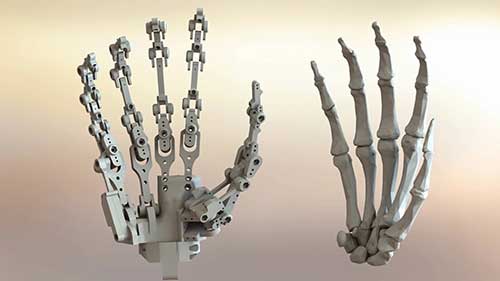
仿生机械手 01 3D打印仿生手
3D打印仿生机械电子手的零部件以后,然后对其设计和构造进行深入分析。
机器人路径规划2
本视频介绍了机器人c空间障碍、自由构型空间、碰撞检测的概念。
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
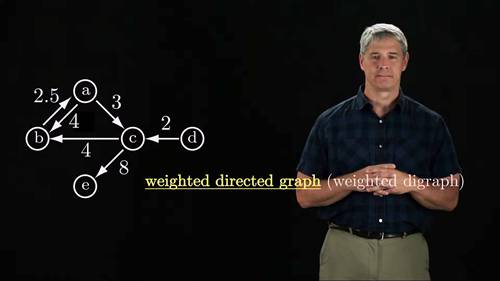
机器人路径规划3
这一集机器人路径规划教程主要介绍了机器人C空间图表算法的无向图、有向图、加权图、非加权图,以及树型图。
观看记录: