导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1561 播放
收藏
片段保存及分享
播放有问题?
请戳这里
阿西莫机器人发展史
时长:11 分钟
类别:智能机器人技术
简介:阿西莫是一种智能机器人,由日本本田公司于1986年开始研制,那么在这40多年的时间里,这款类人机器人取得了怎样的进展呢?我们将为你回顾阿西莫的发展史。
标签:
教学
智能机器人技术
智能机器人发展
相关视频:
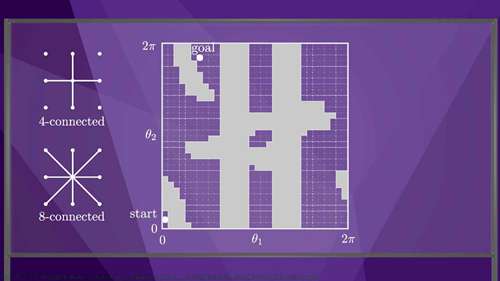
机器人路径规划6
这一集介绍的是用于机器人路径规划的网格算法,其中自由c空间可以使用标准图进行搜索的正则网格表示,为了提高效率,也可以使用多分辨率网格。
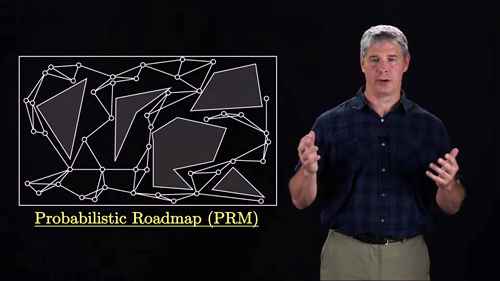
机器人路径规划7
PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
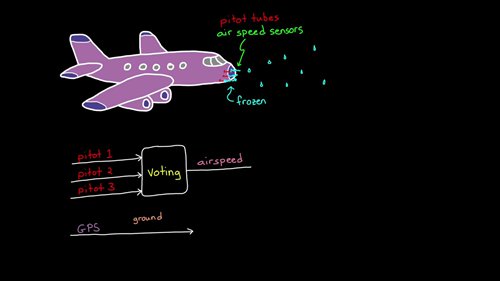
传感器融合与跟踪1
本视频概述了传感器融合的概念,以及它对于设计自主系统所起到的作用。
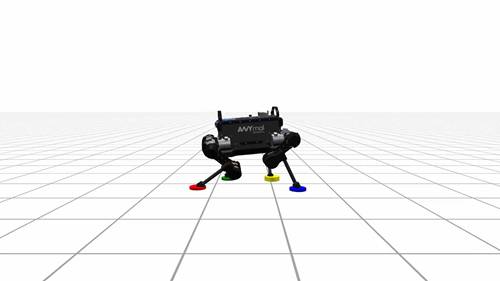
利用深度强化学习规划四足步态
ETH的Anymal研究团队为感知地形运动制订了特定的神经网络策略,在模拟三维环境中,分别使用“本体感受”和“外在感受”来执行“落脚点与肢体联动规划”。
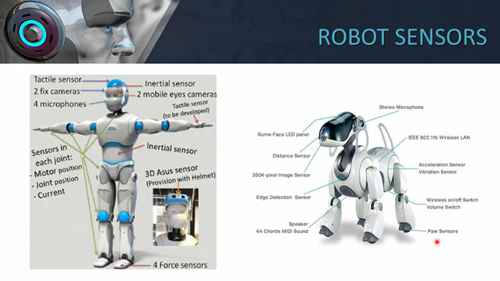
机器人传感器技术
本教程介绍了机器人用于了解环境、避开障碍物和检测物体的传感器。
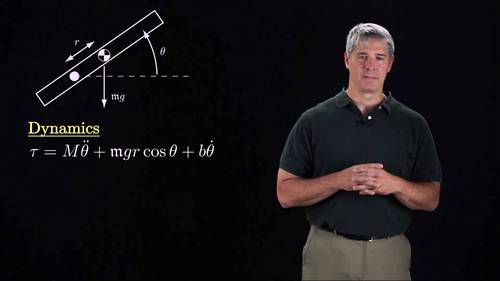
扭矩或力输入的运动控制1
本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
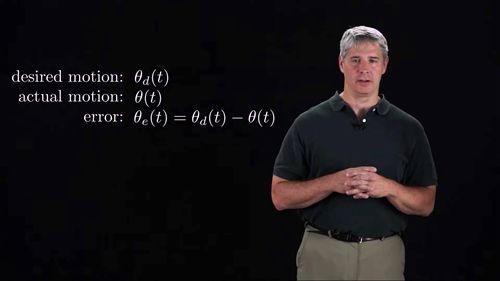
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
多足机器人马克思
由CSIRO公司开发的多足机器人马克思是一个超轻的六足机器人,它可在具有挑战性的室内和室外环境中进行探索工作。
观看记录: