导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1594 播放
收藏
片段保存及分享
播放有问题?
请戳这里
行李运输机器人
时长:3 分钟
类别:智能机器人技术
简介:人工智能是当今炙手可热的领域,其应用在医疗、刑侦、艺术等领域都被广泛应用。那么我们来看看人工智能在机场的应用。本视频展示了美国达拉斯市福特·伍斯机场机器人为国际航线旅客实施行李转运。
标签:
教学
智能机器人技术
人工智能
相关视频:
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
蓝眼技术
想象一下电脑有了七情六欲,能识别用户面部信息,根据用户情绪来与其互动,那会是怎样一番情形。而这一切并不是天方夜谭,通过“蓝眼技术”就能实现。
正向运动学2
我将在视频中介绍开链机器人正运动学中,以末端执行器坐标系表示的指数积公式。
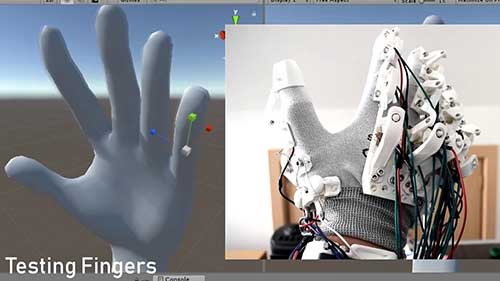
仿生机械手 04 CMC关节
我们来看看CMC(腕掌)关节的生物力学、解剖学和运动学,以及它们如何与当代仿生手设计相联系。
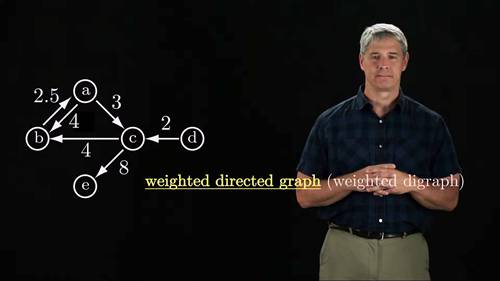
机器人路径规划3
这一集机器人路径规划教程主要介绍了机器人C空间图表算法的无向图、有向图、加权图、非加权图,以及树型图。
机器人在拥挤动态环境中的自主导航
本视频讲解的是一种新的路径规划算法,用于机器人在拥挤行人环境中导航。与许多其他的路径规划算法(假设与其他行人协作)不同,该算法是完全独立的。
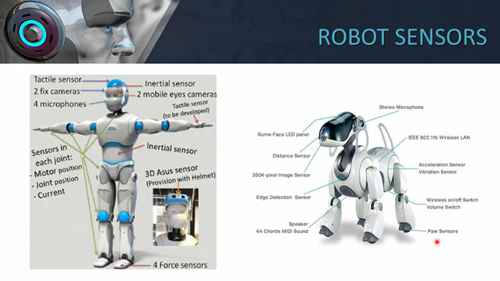
机器人传感器技术
本教程介绍了机器人用于了解环境、避开障碍物和检测物体的传感器。
多足机器人马克思
由CSIRO公司开发的多足机器人马克思是一个超轻的六足机器人,它可在具有挑战性的室内和室外环境中进行探索工作。
观看记录: